In my case the display would turn off after initial loading screen. This can be fixed by configuring "OLED Bright" configuration option (e.g. to 50).
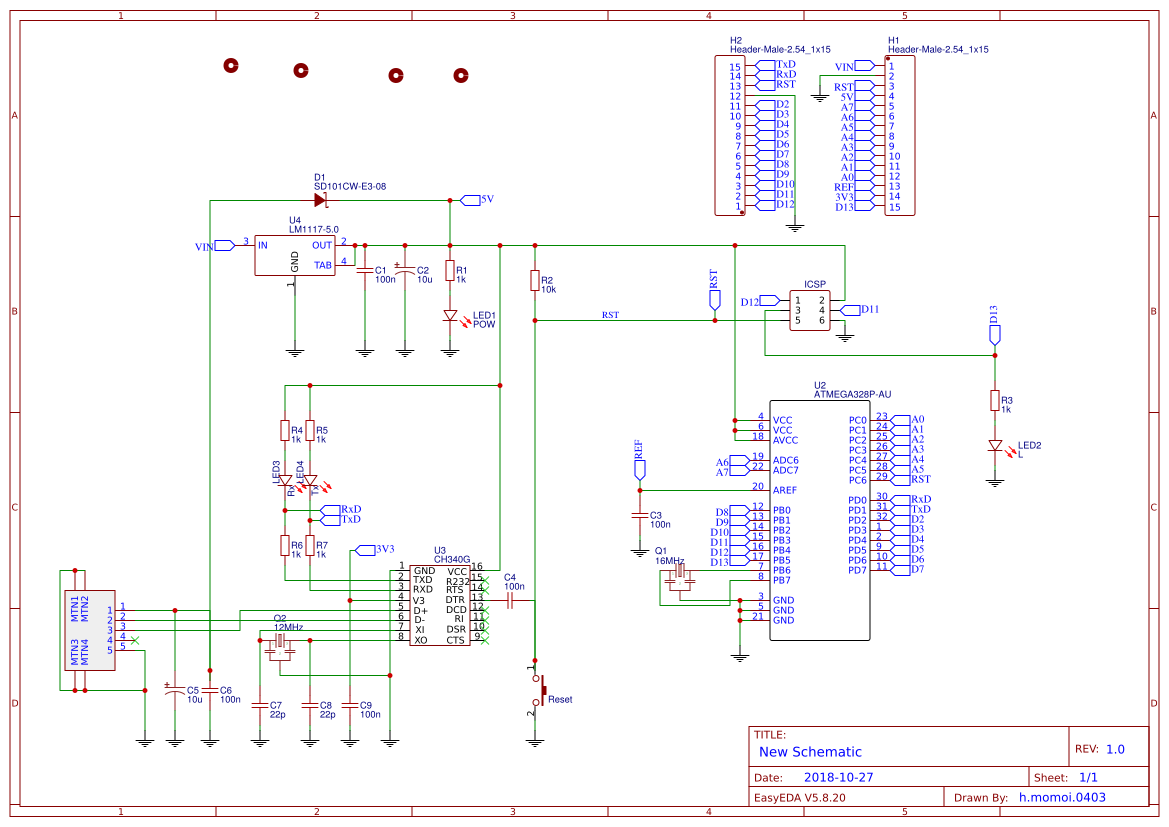
After reset the device sets up Wi-Fi AP at `My TinyGS` and can be reached at [http://192.168.4.1/](http://192.168.4.1/). # Raspberry Pi Pico H ## Specs - Dual core Arm Cortex M0+ 133 MHz - 264kB multi-bank high performance SRAM - 2MiB external flash - Datasheet: [pico-datasheet.pdf](https://wiki.hexadust.net/attachments/51) ### Pinout - `VBUS` **40** - micro-USB input voltage, connected to micro-USB port pin 1. This is nominally 5V (or 0V if the USB is not connected or not powered). - `VSYS` **39** - main system input voltage, which can vary in the allowed range 1.8V to 5.5V, and is used by the on-board SMPS to generate the 3.3V for the RP2040 and its GPIO. - `GND` **38** - ground. - UART TX **1** / RI **2** - `LED` (`GP25`) - LED is connected to GPIO 25. ## [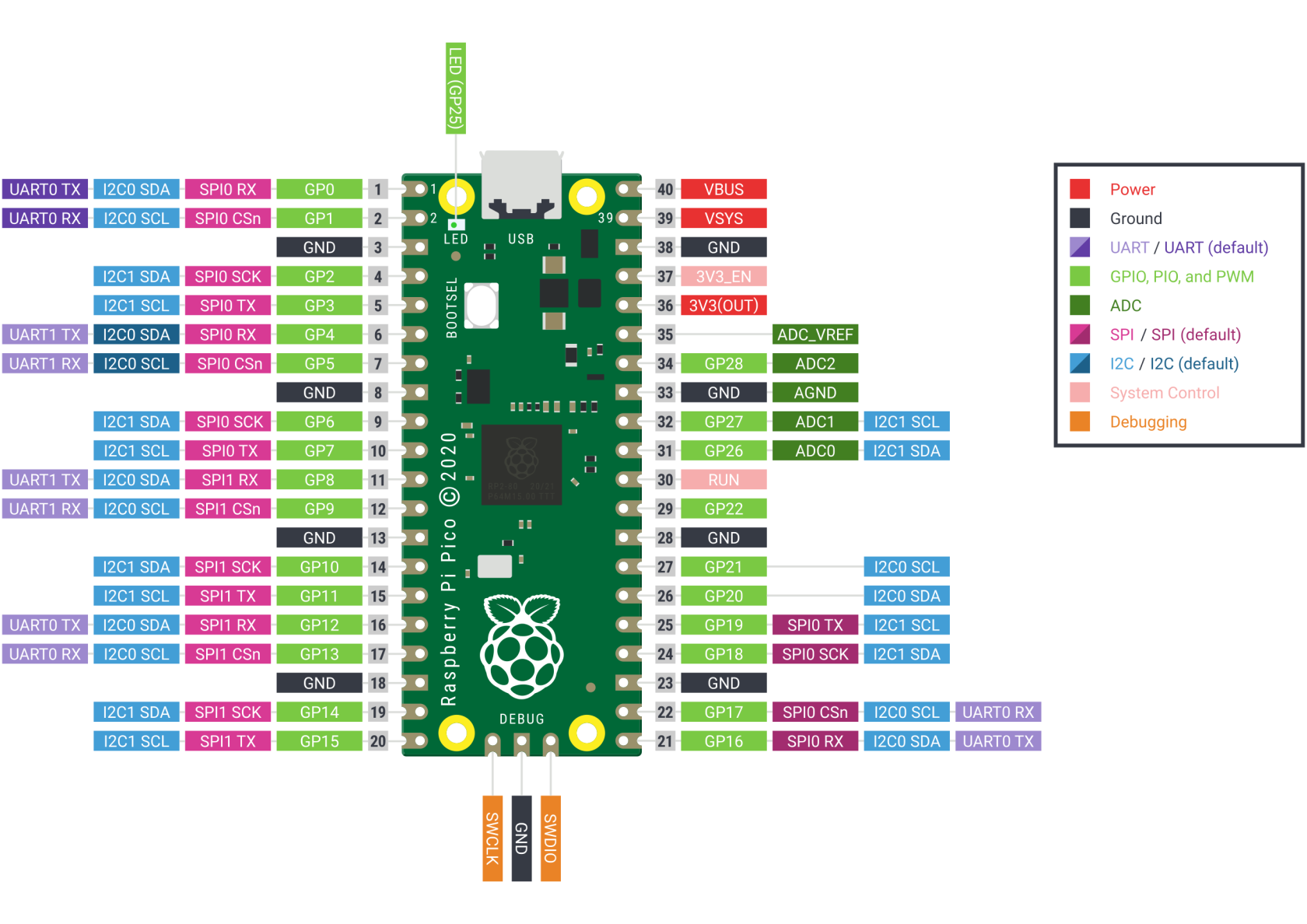](https://wiki.hexadust.net/uploads/images/gallery/2024-12/vO9Xd85WyfglJ6a0-pico-pinout.png)Rust ### Dependencies ```bash rustup target install thumbv6m-none-eabi cargo install flip-link cargo install --locked elf2uf2-rs ``` Set up mount point for RP2 device in `/etc/fstab`: ``` LABEL="RPI-RP2" /mnt/rp2 auto defaults,user,noauto,nosuid,nodev,noexec 0 0 ``` ### Template project setup Template project: [https://github.com/rp-rs/rp2040-project-template](https://github.com/rp-rs/rp2040-project-template) 1. Uncomment `elf2uf2-rs -d` runner in `.cargo/config.toml`: ```diff diff --git a/.cargo/config.toml b/.cargo/config.toml index a565984..04a72c4 100644 --- a/.cargo/config.toml +++ b/.cargo/config.toml @@ -2,8 +2,8 @@ # Choose a default "cargo run" tool (see README for more info) # - `probe-rs` provides flashing and defmt via a hardware debugger, and stack unwind on panic # - elf2uf2-rs loads firmware over USB when the rp2040 is in boot mode -runner = "probe-rs run --chip RP2040 --protocol swd" -# runner = "elf2uf2-rs -d" +#runner = "probe-rs run --chip RP2040 --protocol swd" +runner = "elf2uf2-rs -d" rustflags = [ "-C", "linker=flip-link", ``` 2. Connect (while holding `BOOTSEL` button) and mount RP2 device: `mount /mnt/rp2` 3. Build and run: `cargo run --release` # zeptoforth - Install doc: [https://github.com/tabemann/zeptoforth/wiki/Installing-and-Building-zeptoforth-and-Using-the-zeptoforth-Console](https://github.com/tabemann/zeptoforth/wiki/Installing-and-Building-zeptoforth-and-Using-the-zeptoforth-Console "Installing and Building zeptoforth and Using the zeptoforth Console") - Download latest release from tag: [https://github.com/tabemann/zeptoforth/releases](https://github.com/tabemann/zeptoforth/releases) - Untar - Press **bootsel** and plug in Pico and mount USB volume - Copy `zeptoforth_full_usb-*.uf2` from `bin/*/rp2040_big` to Pico USB volume - Use `tio /dev/ttyACM0` to connect to Forth console # Arduino Nano - Atmel MEGA328P ## Pinout [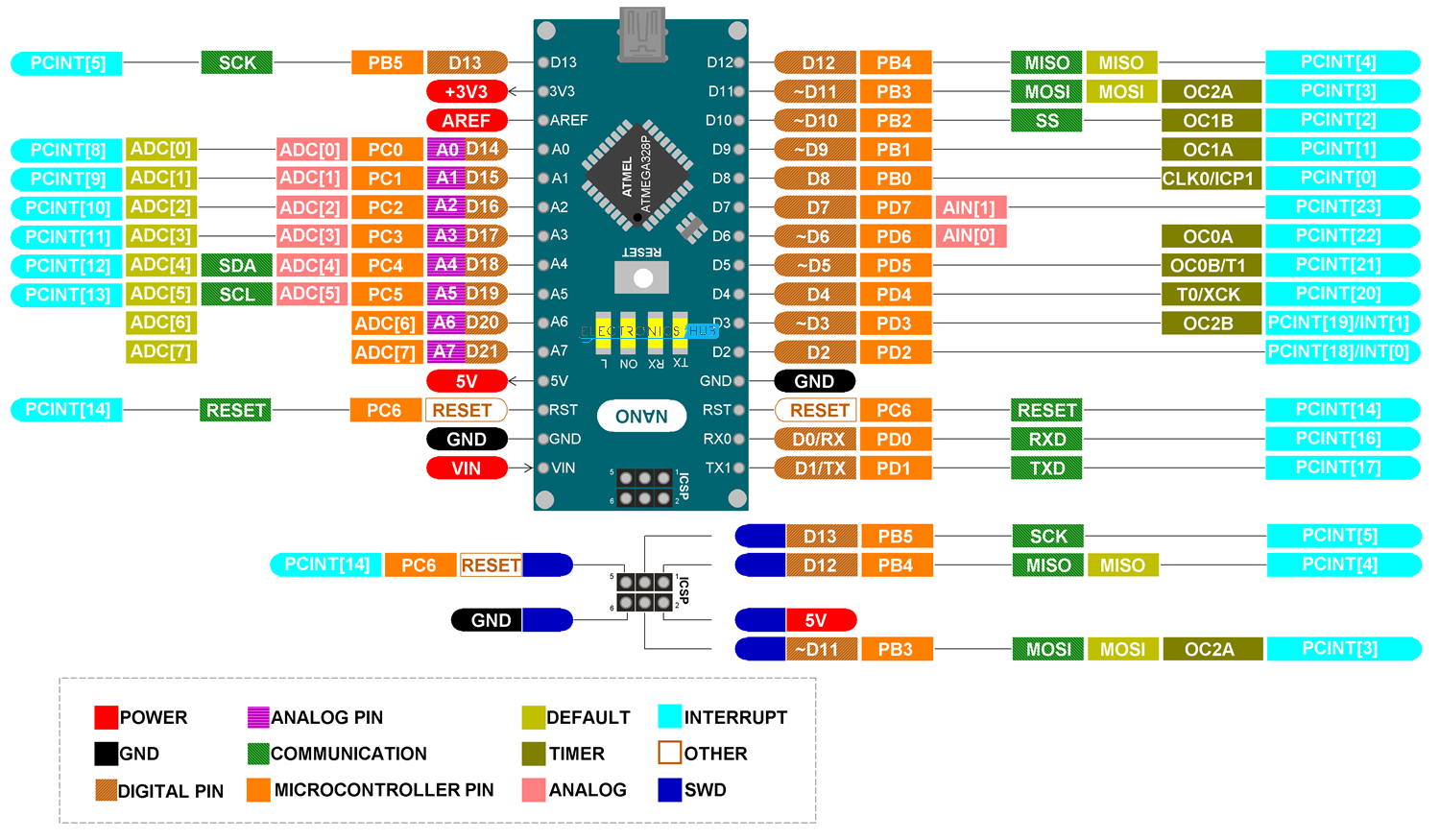](https://wiki.hexadust.net/uploads/images/gallery/2024-12/R6ZtvvBFPpVNeDfS-arduino-nano-pinout-large.png) - 5V - comes form USB-C VBUS and/or output of the regulator (VIN); MCU has operating voltage of 1.8 - 5.5V - VIN - goes to the regulator and can be maximum 15 V; minimum 5 + ~1.1 (dropout) for regulator to regulate; MCU should run with 2.9 V - 3V3 - output from USB-UART - D13/PB5 is connected to LEDSchematics
USB port access assumes that Arduino board was soldered with a distance from the main board - this is to avoid having to cut Arduino board header pins leaving sharp edges.
[](https://wiki.hexadust.net/uploads/images/gallery/2025-01/42JspfN3yyvnhto3-sc2.jpg)[](https://wiki.hexadust.net/uploads/images/gallery/2025-01/hrVObYKPVgunpHQl-sc5.jpg)[](https://wiki.hexadust.net/uploads/images/gallery/2025-01/jrfdg8anrRoSdjnw-sc4.jpg) - FreeCAD model (see *Spreadsheet* for tuning): [Sinclair\_Scientific.FCStd](https://wiki.hexadust.net/attachments/75) - Exported models: - USB-C: - [Sinclair\_Scientific-Body-USB-C.stl](https://wiki.hexadust.net/attachments/79) - [Sinclair\_Scientific-USB Door-USB-C.stl](https://wiki.hexadust.net/attachments/72) - USB mini-B: - [Sinclair\_Scientific-Body-USB-mini-B.stl](https://wiki.hexadust.net/attachments/77) - [Sinclair\_Scientific-USB-mini-B.3mf](https://wiki.hexadust.net/attachments/73) - Common: - [Sinclair\_Scientific-Battery Door.stl](https://wiki.hexadust.net/attachments/69) - [Sinclair\_Scientific-Battery pack holder.stl](https://wiki.hexadust.net/attachments/71) - PrusaSlicer project: - USB-C: [Sinclair\_Scientific-USB-C.3mf](https://wiki.hexadust.net/attachments/74) - USB min-B: [Sinclair\_Scientific-USB-mini-B.3mf](https://wiki.hexadust.net/attachments/73) ### Printing Make sure that main body has supports printed under the battery door area. The battery pack holder goes inside the box on top of the battery pack to prevent it getting pushed in when replacing the batteries. Before assembly use lubricant on sides and on the latches of the battery doors for smooth operation. Object scaling (may vary from printer to printer and printing settings): - For battery bay doors use 99% scale for sides axis (y), 99.8% for length (x) and 98% for thickness (z). - For USB doors use 99% scale for all axis. [](https://wiki.hexadust.net/uploads/images/gallery/2025-01/fkD9BkvoGjGHhuLo-2025-01-23-183704.png) ## Usage As per [User Manual](https://wiki.hexadust.net/attachments/61): - Enter firs number followed by `+` or `-` for negative number (`0+| **Calculation** | **Key Sequence** | **Result Display** |
| **Basic input** | ||
| `592` | `592E2+` | ` 5.9200 00` |
| `4.29` | `429+` | ` 4.9200 00` |
| `0.0037` | `037E-2+` | ` 3.7000-03` |
| `0.5673*10-12` | `05673E-12+` | ` 5.6730-13` |
| `6.7*10-3` (`0.0067`) | `067E-2+` | ` 6.7000-03` |
| **** | ||
| `18*((4.5-3.2)/7)` | `45+32-7%18E1x` | ` 3.3427 00` |
| `(0.326-0.583)*1.48*107` | `0326+0583-148E7x` | `-3.8936 06` |
| **Logarithm (log10)** | ||
| `log 1` | `1⮝x` | ` 0.0000 00` |
| `log 3.6` | `36⮝x` | ` 5.5634-01` |
| `log 71000` | `71E4⮝x` | ` 4.8512 00` |
| `log 10` | `1E1⮝x` | ` 1.0000 00` |
| **Natural logarithm (loge) - Multiply by loge10 (`ln10 2.30259`)** | ||
| `loge5` | `5⮝x23026x` | ` 1.6095 00` |
| **Anti-logarithm (10x) - input from `0.0` to `99.999`, error aprox `0.001`** | ||
| `100` | `0⮟x` | ` 1.0000 00` |
| `sqrt 10` | `05⮟x` | ` 3.1621 00` |
| `101.5` | `15⮟x` | ` 3.1621 01` |
| `1067.5` | `675E1⮟x` | ` 3.1621 67` |
| **Exponential function (ex) - Divide by loge10 (`ln10 2.30259`)** | ||
| `sqrt(e)*(e0.5)` | `05+23026%⮟x` | ` 1.6486 00` |
| **Sine, Cosine, Tangent - Angle between `0` and `PI/2` radians (`90o`), error less than `0.001`** | ||
| `sin 0.3966` | `03966⮝+` | ` 3.8629-01` |
| `cos 0.66` | `066⮝-` | ` 7.8994-01` |
| `tan 0.1322` | `01322⮝%` | ` 1.3330-01` |
| **Sine, Cosine, Tangent in degree - Divide by conversion factor (`1rad 57.2958o`)** | ||
| `sin 45o` | `45+573%⮝+` | ` 7.0729-01` |
| `cos 60o` | `6+573%⮝-` | ` 5.0008-01` |
| `tan 75o` | `3+573%⮝%` | ` 3.7197 00` |
| **Arcsine, Arccosine, Arctangent - Result in radians, input from `0.0` to `9.9995`, error max** `0.001` | ||
| `asin 0.9994` | `09994⮟+` | ` 1.5350 00` |
| `acos 0.3` | `03⮟-` | ` 1.2660 00` |
| `atan 3` | `3⮟%` | ` 1.2500 00` |
| **Arcsine, Arccosine, Arctangent in degree - Multiply result by conversion factor (`1rad 57.2958o`)** | ||
| `asin 0.5` | `05⮟+573E1x` | ` 2.9967 01` |
| `acos 0.5` | `05⮟-573E1x` | ` 6.0050 01` |
| `atan 1` | `1⮟%573E1x` | ` 4.5038 01` |
| **Roots** | ||
| `sqrt 6` (base 2) | `6⮝x2%⮟x` | ` 2.4495 00` |
| root base 3 of `47.6/1.7` | `476E1+17%⮝x3%⮟x` | ` 3.0367 00` |
- **Orange** - `TX`/`SC` (Output from Probe)
- **Black** - `GND`
- **Yellow** - `RX`/`SD` (Input to Probe or I/O)
## Pico connection
- The Debug Probe "D" port to Pico H SWD JST-SH connector
- The Debug Probe "U" port, with the three-pin JST-SH connector to 0.1-inch header (male):
## Debugging
```
openocd -f interface/cmsis-dap.cfg -f target/rp2040.cfg -c "adapter speed 5000"
# on another terminal
telnet localhost 4444
reg
```
## Flashing and debugging
### probe-rs
- [Project template for rp2040-hal](https://github.com/rp-rs/rp2040-project-template)
Using runner command: `sudo probe-rs run --chip RP2040 --protocol swd`
Cargo configuration:
- Debug Probe `RX` connected to Pico H `TX` pin
- Debug Probe `TX` connected to Pico H `RX` pin
- Debug Probe `GND` connected to Pico H `GND` pin